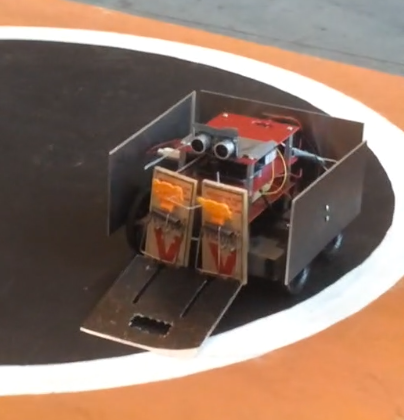
In a Mechatronics course final team project, I designed the layout and circuitry of our Arduino-controlled autonomous robot whose objective was to find and push its rival bot out of a defined ring. I then helped program the Arduino, as well as equip the robot with body armor, a mousetrap attack mechanism, three breadboards, four motors, three QTI sensors, one sonar sensor, and a power supply.